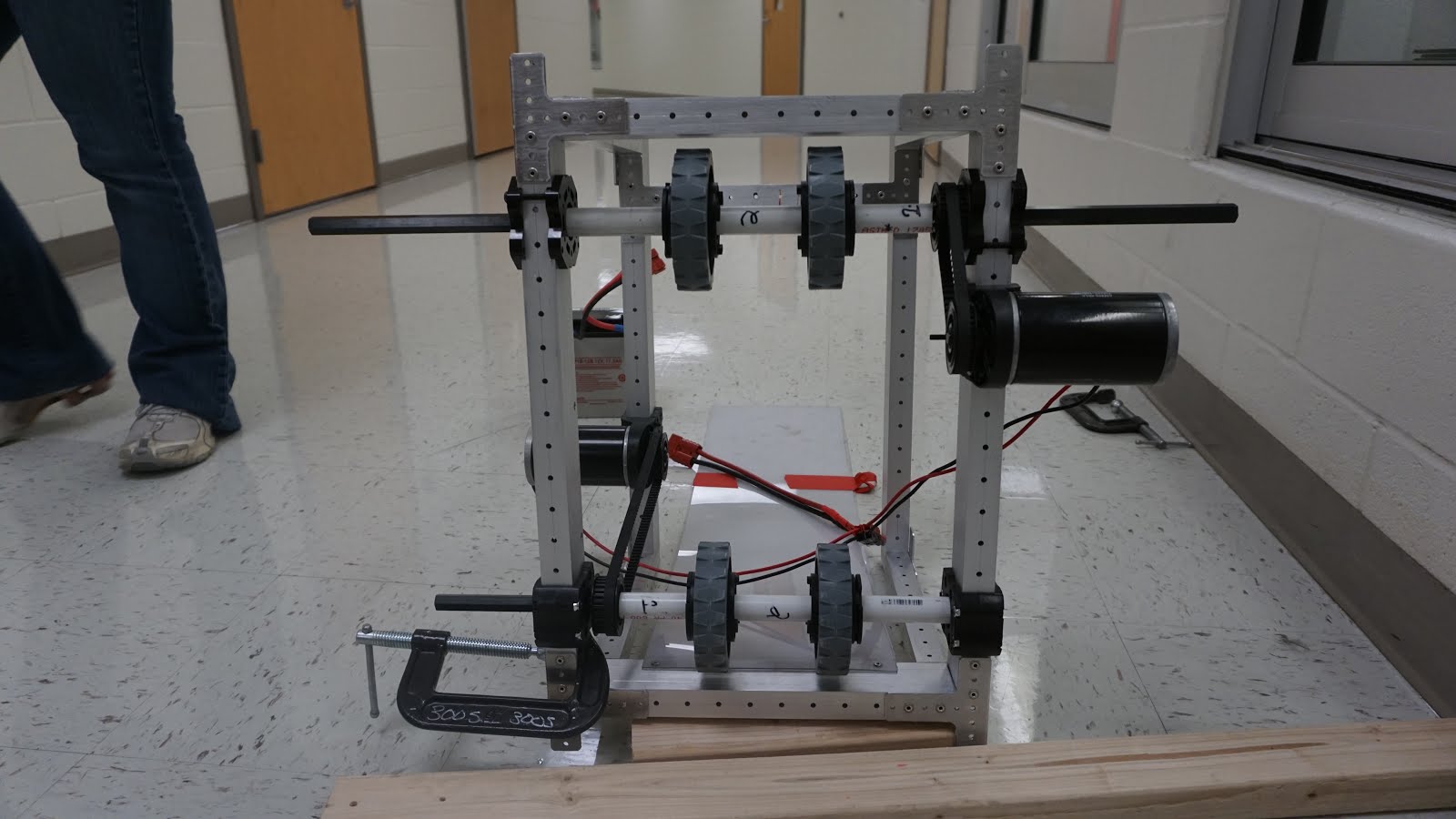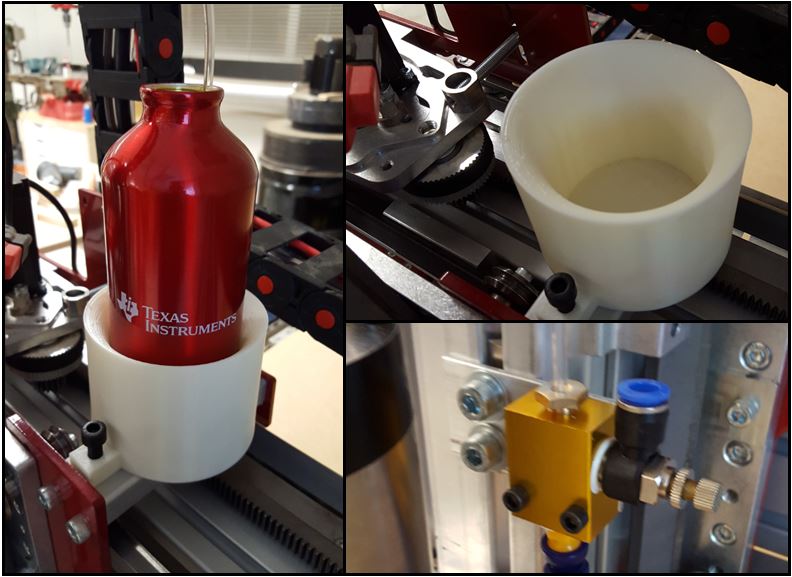
Thursday, we continued to build prototypes, but we also wanted to start getting some more quantifiable data off of them. Additionally, we finished the spindle upgrade on the gantry mill, and began some work on vision targeting. Few positive notes, we got our shipment of game pieces in, so now we have more to test ball […]